Hand Mk5 Coupling Laws
Coupling variables
Below, a sketch of the finger kinematics is reported:
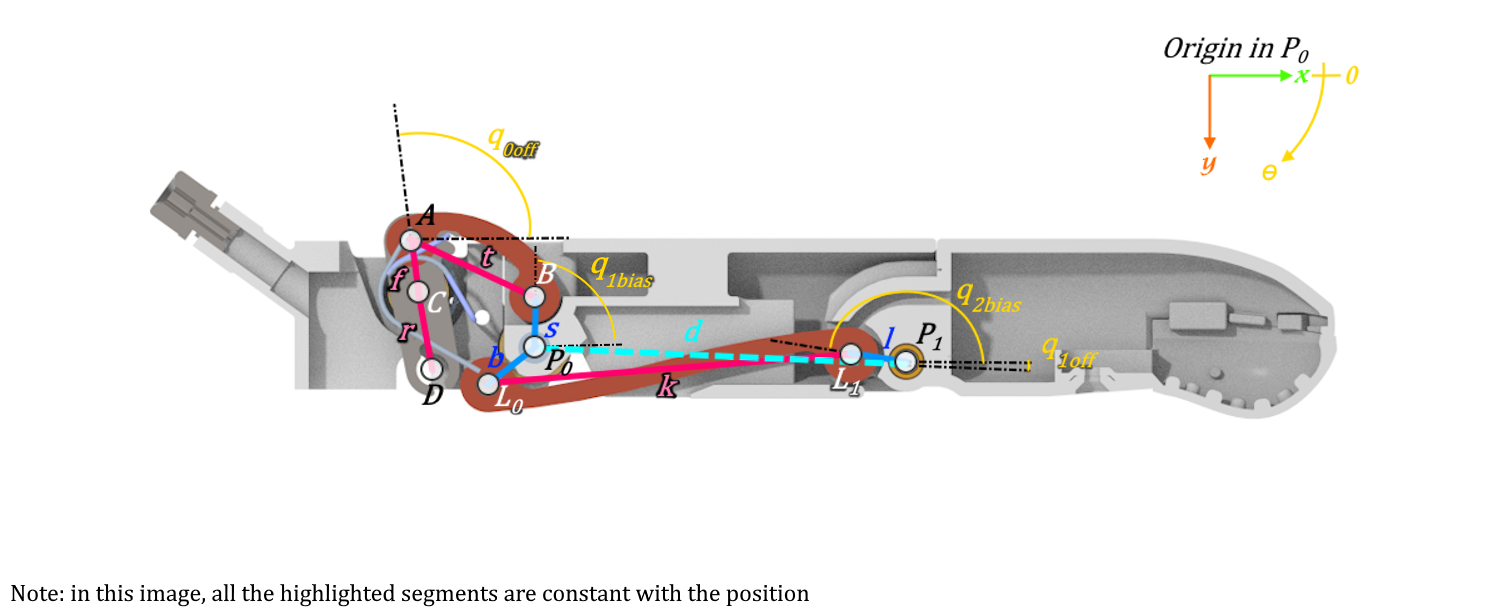
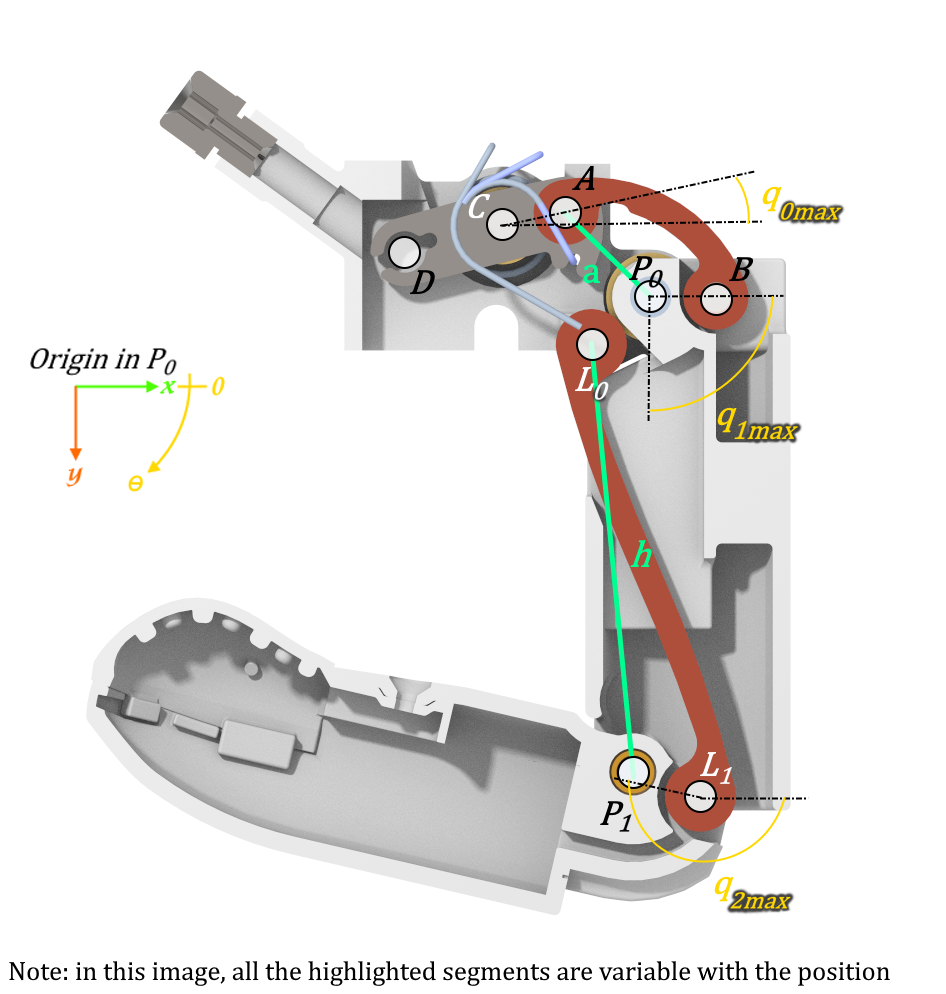
Hand Mk5 leverism
Unless specified otherwise, angles reported in the next sections follow the convention in figure.
- \(q_0\) is the variable angle of \(A-C\).
- \(q_1\) is the variable angle of the first phalanx.
- \(q_2\) is the variable angle of the second phalanx.
Joint angle feedback
The joint encoder is mounted in position \(P_0\), hence we can measure the angle \(q_1\) that in turn is used to close the control loop.
Motor encoder feedback
A quadrature encoder is mounted on the motor shaft, which is currently used only to handle the tendon wrapping.
Coupling Laws
Considering the following quantities:
We have \(q_{2}\) that depends only on the variable \(q_{1}\) through the implicit dependence on \(P_{1}\) and h:
The Jacobian that relates the variations of \(q_{2}\) to the variations of \(q_{1}\) is:
The relationship between \(q_{0}\) and \(q_{1}\) is:
Let us move on to explore the relation between the motor pulling the tendon and \(q_0\). Both the tendon ends are clamped to bushings that describe circular arcs; one bushing is centered in \(D\) and its trajectory is an arc centered in \(C\) whereas the other is centered in \(F\) and its trajectory is an arc centered in \(E\).
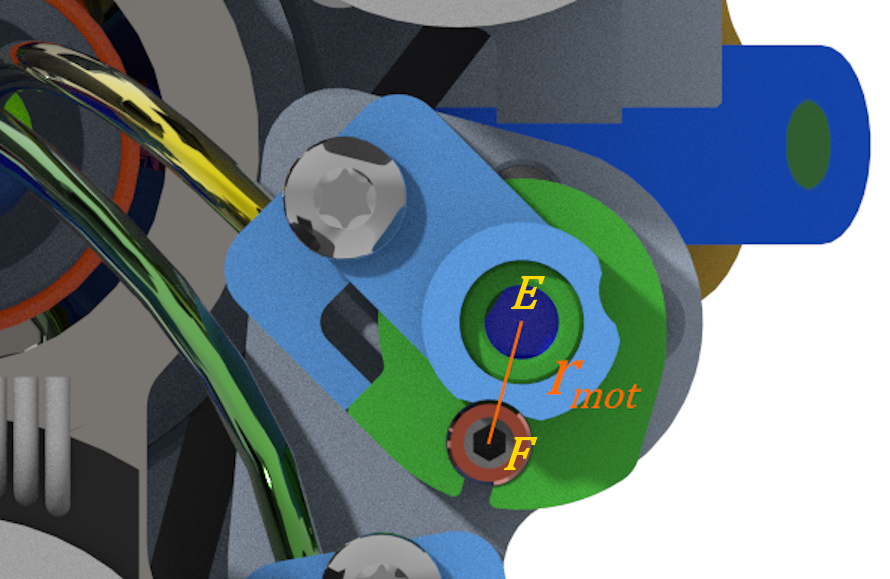
Finger motor pulley (forearm)
Be \(q_{mot}\) the variable angle of the motor pulley and assuming the steel wire to be inextensible, the arc lengths described by the two trajectories shall be equal, i.e.:
Hence we get
Mk5.1 coupling variables
The following table describes the coupling variables of the finger mechanisms in the hand Mk5.1.
| Name | UoM | Values | Description | ||||
|---|---|---|---|---|---|---|---|
| THUMB | INDEX | MIDDLE | RING | PINKY | |||
| \(L_{0x}\) | mm | -5 | -5 | -5 | -5 | -5 | \(x\) coordinate of the first end of the leverism |
| \(L_{0y}\) | mm | 4 | 4 | 4 | 4 | 4 | \(y\) coordinate of the the first end of the leverism |
| \(L_{1x}\) | mm | 29 | 34 | 34 | 34 | 29 | \(x\) coordinate of the second end of the leverism |
| \(L_{1y}\) | mm | 0.8 | 0.8 | 0.8 | 0.8 | 0.5 | \(y\) coordinate of the second end of the leverism |
| \(P_{1x}\) | mm | 35 | 40 | 40 | 40 | 35 | \(x\) coordinate of the axis of the joint between the first and the second phalanx |
| \(P_{1y}\) | mm | 1.5 | 1.5 | 1.5 | 1.5 | 1.5 | \(y\) coordinate of the axis of the joint between the first and the second phalanx |
| \(q_{0off}\) | deg | -97.54 | -97.54 | -97.54 | -97.54 | -97.52 | Angle of \(A-C\) when the finger is fully open |
| \(q_{2bias}\) | deg | -173.35 | -173.35 | -173.35 | -173.35 | -170.53 | Angle of \(L_1-P_1\) when the finger is fully open |
| \(q_{1off}\) | deg | 2.45 | 2.15 | 2.15 | 2.15 | 2.46 | Angle of \(P_1-P_0\) when the finger is fully open |
| \(q_{1bias}\) | deg | -90 | -90 | -90 | -90 | -90 | Angle of \(B-P_0\) when the finger is fully open |
| \(q_{0max}\) | deg | -12 | -12 | -12 | -12 | -11.97 | Max value of \(q_0\), i.e. when the finger is fully closed |
| \(q_{1max}\) | deg | 90 | 90 | 90 | 90 | 90 | Max value of \(q_1\), same as above |
| \(q_{2max}\) | deg | 191.44 | 193.06 | 193.06 | 193.06 | 188.7 | Max value of \(q_2\), same as above |
| \(k\) | mm | 34.15 | 39.13 | 39.13 | 39.13 | 34.18 | Connecting rod length, \(\|L_1-L_0\|\) |
| \(d\) | mm | 35.03 | 40.03 | 40.03 | 40.03 | 35.03 | Distance between the two joints, \(P_1\) and \(P_0\) |
| \(l\) | mm | 6.04 | 6.04 | 6.04 | 6.04 | 6.08 | Distance between \(L_1\) and \(P_1\) |
| \(b\) | mm | 6.4 | 6.4 | 6.4 | 6.4 | 6.4 | Distance between \(L_0\) and \(P_0\) |
| \(s\) | mm | 5.5 | 5.5 | 5.5 | 5.5 | 5.5 | Distance between joint \(B\) of the connecting rod \(A-B\) and joint \(P_0\) |
| \(t\) | mm | 14.5 | 14.5 | 14.5 | 14.5 | 14.5 | Length of the connecting rod \(A-B\) |
| \(f\) | mm | 5.5 | 5.5 | 5.5 | 5.5 | 5.5 | Length of the connecting rod \(A-C\) |
| \(r\) | mm | 8.5 | 8.5 | 8.5 | 8.5 | 8.5 | Length of the connecting rod \(D-C\) |
| \(r_{mot}\) | mm | 5 | 5 | 5 | 5 | 5 | Distance between the axis of the bushing and the rotational axis of the finger motor |
Mk5.0 coupling variables
The following table describes the coupling variables of the finger mechanisms in the hand Mk5.0.
| Name | UoM | Values | Description | ||||
|---|---|---|---|---|---|---|---|
| THUMB | INDEX | MIDDLE | RING | PINKY | |||
| \(L_{0x}\) | mm | -5.55 | -5 | -5 | -5 | -5 | \(x\) coordinate of the first end of the leverism |
| \(L_{0y}\) | mm | 2.85 | 4 | 4 | 4 | 4 | \(y\) coordinate of the the first end of the leverism |
| \(L_{1x}\) | mm | 11.5 | 24 | 24 | 24 | 19 | \(x\) coordinate of the second end of the leverism |
| \(L_{1y}\) | mm | 1.5 | 0.8 | 0.8 | 0.8 | 0.5 | \(y\) coordinate of the second end of the leverism |
| \(P_{1x}\) | mm | 20 | 30 | 30 | 30 | 25 | \(x\) coordinate of the axis of the joint between the first and the second phalanx |
| \(P_{1y}\) | mm | 1.5 | 1.5 | 1.5 | 1.5 | 1.5 | \(y\) coordinate of the axis of the joint between the first and the second phalanx |
| \(q_{0off}\) | deg | -110.71 | -97.54 | -97.54 | -97.54 | -97.54 | Angle of \(A-C\) when the finger is fully open |
| \(q_{2bias}\) | deg | -180 | -173.35 | -173.35 | -173.35 | -170.54 | Angle of \(L_1-P_1\) when the finger is fully open |
| \(q_{1off}\) | deg | 4.29 | 2.86 | 2.86 | 2.86 | 3.43 | Angle of \(P_1-P_0\) when the finger is fully open |
| \(q_{1bias}\) | deg | -90 | -90 | -90 | -90 | -90 | Angle of \(B-P_0\) when the finger is fully open |
| \(q_{0max}\) | deg | -44.68 | -11.97 | -11.97 | -11.97 | -11.97 | Max value of \(q_0\), i.e. when the finger is fully closed |
| \(q_{1max}\) | deg | 86.35 | 90 | 90 | 90 | 90 | Max value of \(q_1\), same as above |
| \(q_{2max}\) | deg | 135.65 | 189.2 | 189.2 | 189.2 | 183.31 | Max value of \(q_2\), same as above |
| \(k\) | mm | 17.1 | 29.18 | 29.18 | 29.18 | 24.25 | Connecting rod length, \(\|L_1-L_0\|\) |
| \(d\) | mm | 20.06 | 30.04 | 30.04 | 30.04 | 25.04 | Distance between the two joints, \(P_1\) and \(P_0\) |
| \(l\) | mm | 8.5 | 6.04 | 6.04 | 6.04 | 6.08 | Distance between \(L_1\) and \(P_1\) |
| \(b\) | mm | 6.24 | 6.4 | 6.4 | 6.4 | 6.4 | Distance between \(L_0\) and \(P_0\) |
| \(s\) | mm | 6.52 | 5.5 | 5.5 | 5.5 | 5.5 | Distance between joint \(B\) of the connecting rod \(A-B\) and joint \(P_0\) |
| \(t\) | mm | 13 | 14.5 | 14.5 | 14.5 | 14.5 | Length of the connecting rod \(A-B\) |
| \(f\) | mm | 6 | 5.5 | 5.5 | 5.5 | 5.5 | Length of the connecting rod \(A-C\) |
| \(r\) | mm | 7.5 | 8.5 | 8.5 | 8.5 | 8.5 | Length of the connecting rod \(D-C\) |