Check your installation
This page will guide your through simple steps to check that you have correctly installed YARP and the iCub software. We assume you have followed all installations steps.
Check YARP
First step is to have a yarpserver running.
In a terminal type:
yarpserver
Depending on the system the console will look something like this:
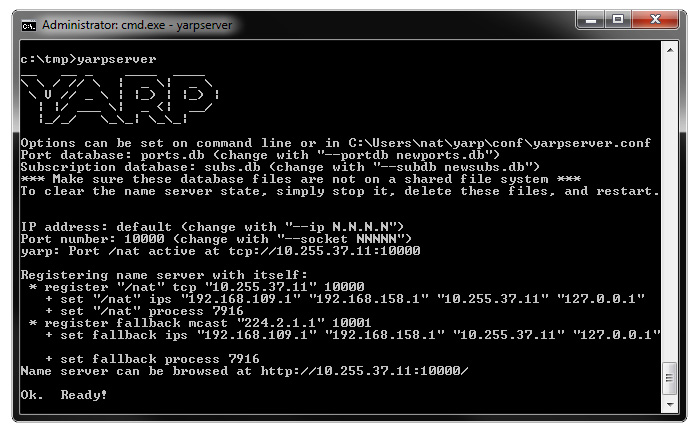
If you type on a web browser http://127.0.0.1:10000 you get
information about the name server (registered ports, info, etc.).
We can just check functionality by running a simple example. On another terminal type:
yarp read /portread
on a third terminal:
yarp write /portwrite
and on yet another terminal:
yarp connect /portwrite /portread
you'll see the effect on the name server:
yarp: registration name /portwrite ip 127.0.0.1 port 10012 type tcp
yarp: registration name /portread ip 127.0.0.1 port 10002 type tcp
Now, anything typed on the yarp write will be sent and printed on the read side.
Check iCub
You can run the iCub simulator on Gazebo. To this end, we need to grab some Gazebo specific configuration files.
Open a terminal and type in the following to get configured:
git clone https://github.com/vvv-school/tutorial_joint-interface.git
cd tutorial_joint-interface
cmake -S . -B build
cmake --build build --target install
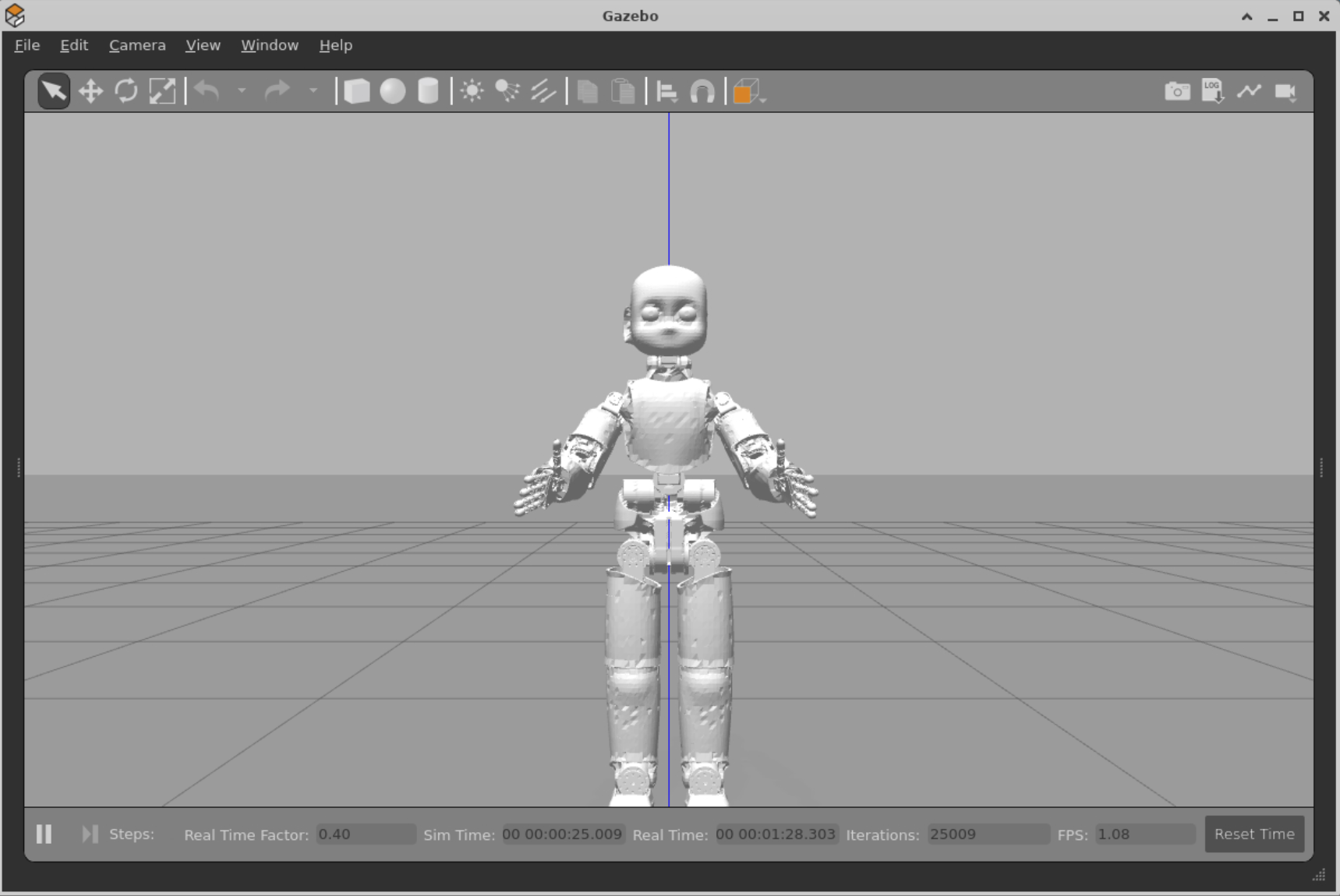
Finally, you can launch the simulator:
gazebo tutorial_joint-interface.sdf
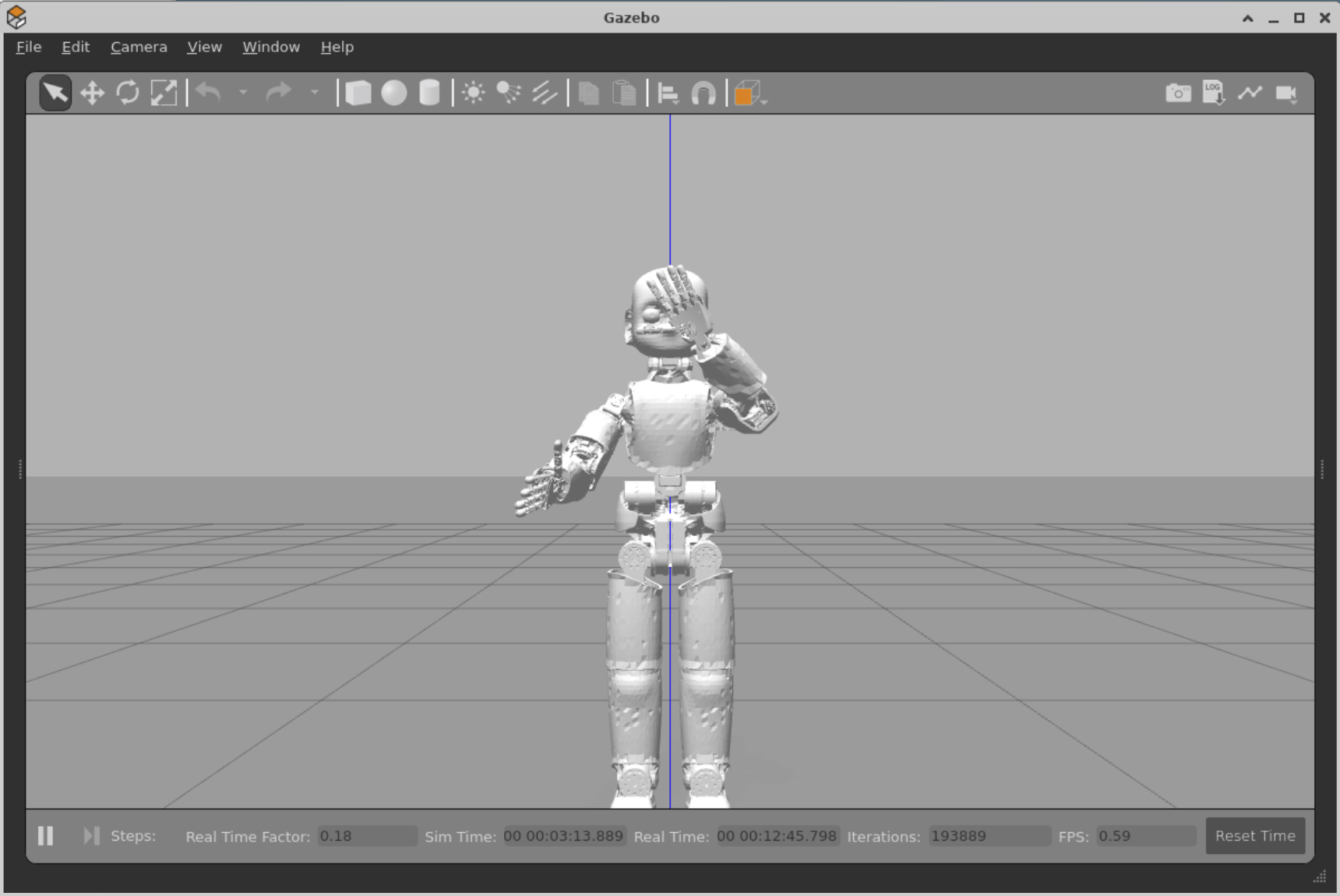
The simulator should open up in a new window:
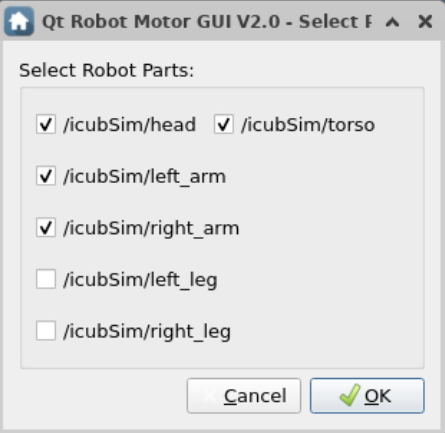
Now you can move each joint individually using the yarpmotorgui tool.
On a different terminal type:
yarpmotorgui --robot icubSim
Unselect the legs and click on ✔️ OK
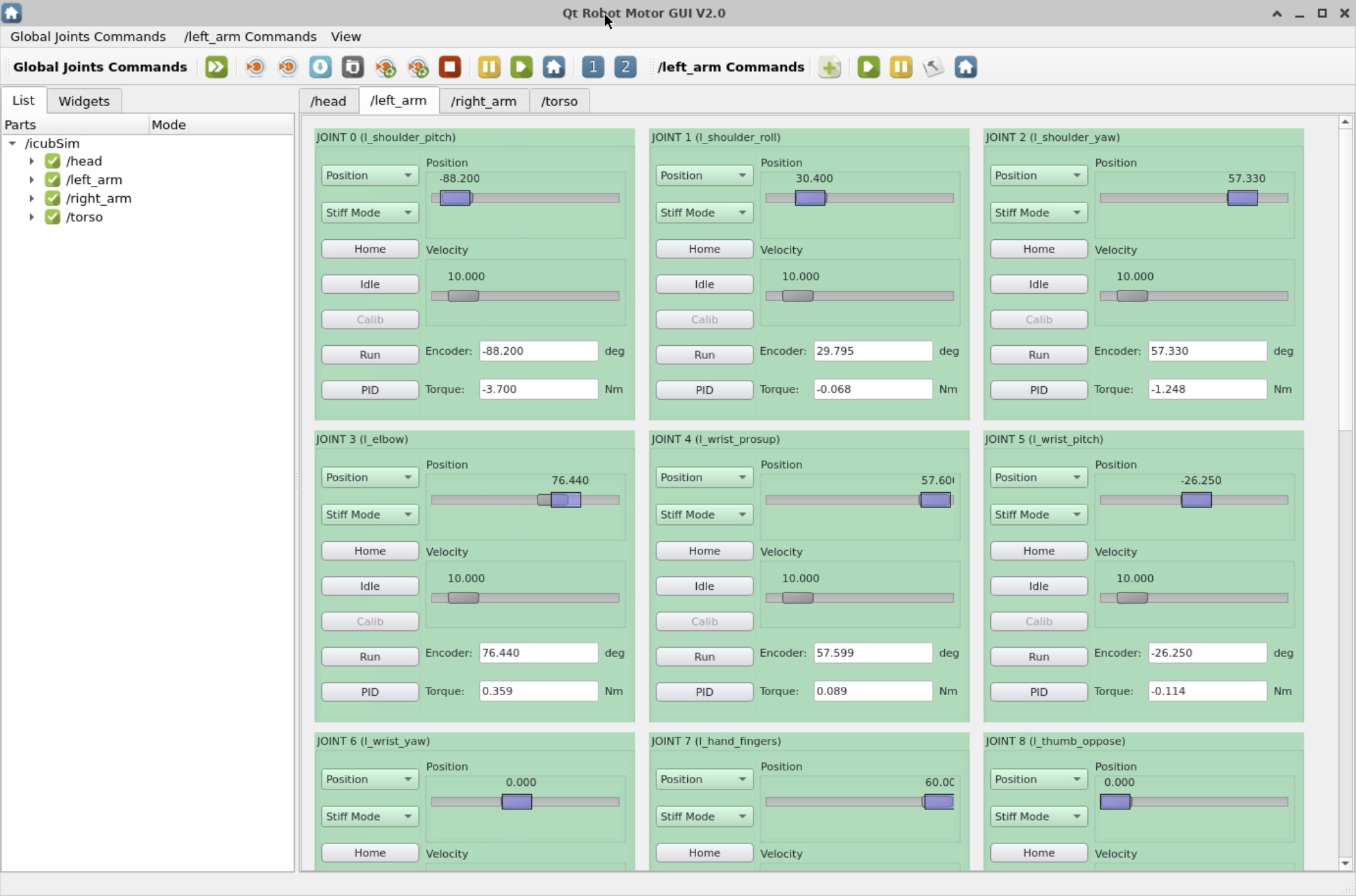
Select the left_arm and drag the position of each joint to move the
arm:
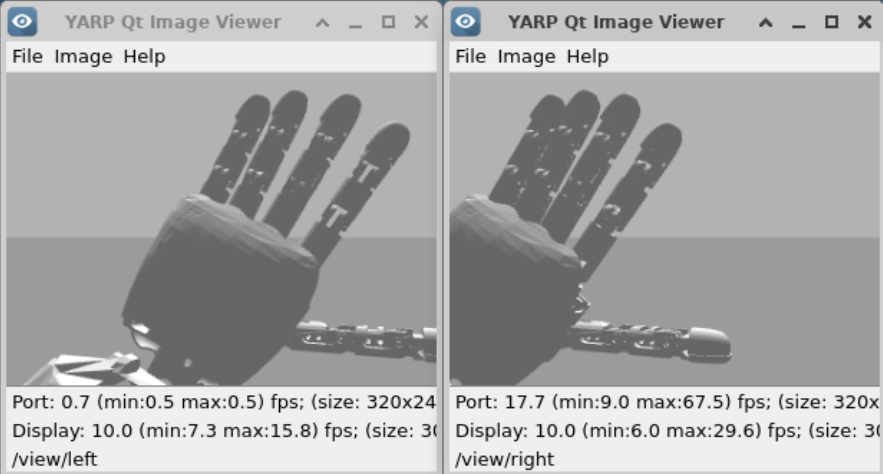
You can now view the output from the cameras. On different consoles, run two viewers:
yarpview --name /view/left
yarpview --name /view/right
and connect them:
yarp connect /icubSim/cam/left/rgbImage:o /view/left
yarp connect /icubSim/cam/right/rgbImage:o /view/right
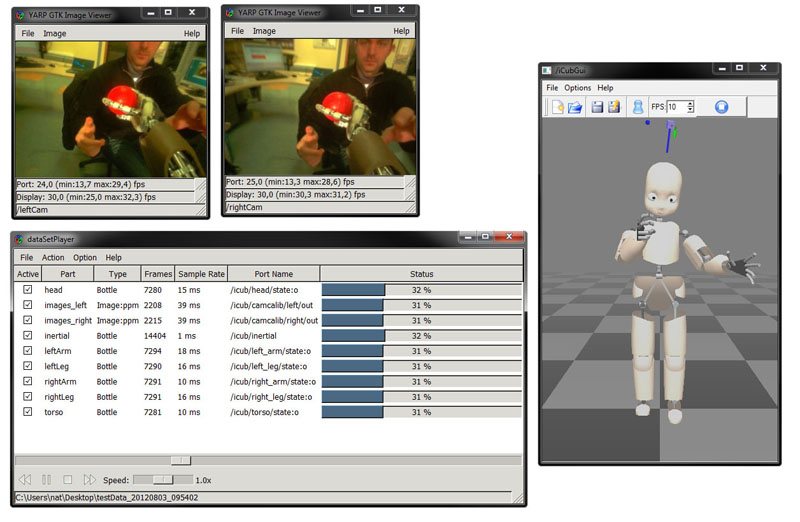
Play a recorded sequence
You can also use the dataSetPlayer to replay a recorded sequence. This will reproduce all the sensory information available on the real robot during a simple experiment. Follow the instructions at https://yarp.it/latest/group__yarpdataplayer__example.html.
Tutorials
Now you are ready to try our tutorials available at http://www.icub.eu/doc/icub-main/icub_tutorials.html.