How to use two real iCub robots on the same network
How to use two real iCub robots on the same network
This page is intended to be used as a practical guide for setting up two real iCub robots together on the same network to run controllers designed for the two of them. Ideally, the steps can be extended to multiple robots without any more changes.
The following steps are done using iCubGenova02 (aka Purple) and iCubGenova04 (aka Green). The two major modifications are on the Network side and Configuration side.
Network Side
The first conflict is that both the robots can be accessed by logging into the head using ssh icub-head with the same ip (10.0.0.2). So, while two robots have to be on the same network this has to be changed.
The robots' network configuration is set using netplan. Do ssh icub-head and go to /etc/netplan directory. The configuration files for netplan are YAML-based. The configuration file loaded by default is 50-icub.yaml and its contents are:
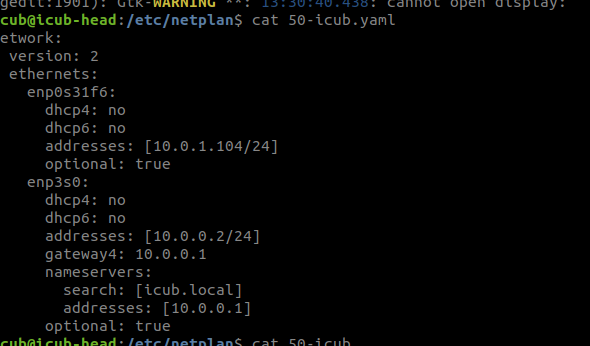
Now, change the IP address 10.0.0.2 to some other IP address such as 10.0.0.200. Once the IP address is changed do sudo netplan apply to load the new network configuration file. At this point, you will not be able to access icub-head any longer and you need to ssh 10.0.0.200 to reach the head of the robot.
Note
Ensure to switch the IP address back to the original default IP value of 10.0.0.2 and do sudo netplan apply once the experiments with the robot are finished.
Robot configurations side
To launch an icub robot, multiple configuration files are launched through yarprobotinterface. In general, these files are robot-specific (Eg. iCubGenova02) and contain parameters tuned for that particular robot. However, the port names used in all these configuration files are usually the same. So, while trying to launch multiple robots on the same network, a port address conflict occurs.
This issue can be solved by using different port prefix names in the configuration files, e.g. changing from icub to more robot-specific stemnames like icub02 for iCubGenova02 and icub04 for iCubGenova04.
In particular, the following files have to be changed:
- Update robot
yarprobotinterfaceport prefix. - Update interfaces wrapper port prefix.
- Add port prefix to Whole-Body-Dynamics by adding the following line:
and adding the prefix to external wrench port names, e.g.:
<param name="portPrefix">/<robot-prefix>/wholebodydynamics</param><param name="/<robot-prefix>/wholeBodyDynamics/left_leg/cartesianEndEffectorWrench:o">(l_foot,l_sole,root_link)</param> - Update cartesian controllers port prefix.
As a simple test, you can launch yarpmotorgui --robot <robot-prefix> to try to control the robot, and check all the opened ports with yarp name list.