iCub Foward Kinematics - Fingers
Left
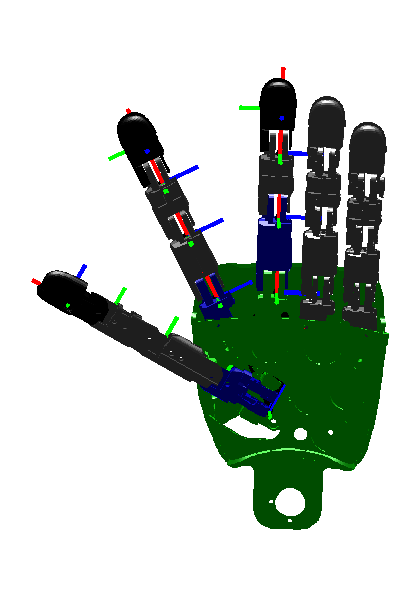
This page provides the forward kinematics of the thumb, the index and the middle fingers of the left hand. It describes how to construct all the finger matrices T_RoLt (thumb), T_RoLi (index) and T_RoLm (middle). Each matrix is constructed in two steps i.e. T_RoLfin = T_Ro0fin * T_0nfin (where fin is t for the thumb, i for the index and m for the middle). The first matrix T_Ro0 describes the rigid roto-translation from the end effector reference frame (described in ICubFowardKinematics) to points in the 0th reference frame as defined by the Denavit-Hartenberg convention. The second matrix T_0n corresponds to the Denavit-Hartenberg description of the forward kinematic, i.e. the roto-translation from the 0th reference frame to the nth reference frame being n the number of degrees of freedom.
The matrix T_0n is itself the composition of n matrices as defined by the DH convention: T_0n = T_01 T_12 ... T_(n-1)n.
The frames are oriented as in the Figure. The '''x''' axis is in '''red'''. The '''y''' axis is in '''green'''. The '''z''' axis is in blue.
THUMB
Here is the matrix T_Ro0t for the thumb version a (lengths are in mm):
| 0.121132 | 0.043736 | 0.991672 | -25.391770 |
| -0.958978 | 0.263104 | 0.105535 | -11.783901 |
| 0.256297 | -0.963776 | 0.073812 | 1.7018 |
| 0 | 0 | 0 | 1 |
Here is the matrix T_Ro0t for the thumb version b (lengths are in mm):
| 0.478469 | 0.063689 | 0.875792 | -24.029759 |
| -0.878095 | 0.039246 | 0.476873 | -11.93433 |
| 0.004 | -0.997198 | 0.074703 | 1.68926 |
| 0 | 0 | 0 | 1 |
Here is the table of the actual DH parameters for thumb.
| Link i / H – D | Ai (mm) | di (mm) | alpha i (rad) | theta_i (deg) |
|---|---|---|---|---|
| i = 0 | 0 | 0 | pi/2 | 10 -> 90 |
| i = 1 | 21.0 | -5.6 | 0 | 0 (dummy link) |
| i = 2 | 26.0 | 0 | 0 | 0 -> 90 |
| i = 3 | 22.0 | 0 | 0 | 0 -> 90 |
| i = 4 | 16.8 | 0 | -pi/2 | 0 -> 90 |
INDEX
Here is the matrix T_Ro0i for the index (lengths are in mm):
| 0.898138 | 0.439714 | 0.0 | 2.45549 |
| -0.43804 | 0.89472 | -0.087156 | -25.320433 |
| -0.038324 | 0.078278 | 0.996195 | 10.973325 |
| 0 | 0 | 0 | 1 |
Here is the table of the actual DH parameters for index.
| Link i / H – D | Ai (mm) | di (mm) | alpha i (rad) | theta_i (deg) |
|---|---|---|---|---|
| i = 0 | 14.8 | 0 | -pi/2 | 0 -> 20 |
| i = 1 | 25.9 | 0 | 0 | 0 -> 90 |
| i = 2 | 22.0 | 0 | 0 | 0 -> 90 |
| i = 3 | 16.8 | 0 | -pi/2 | 0 -> 90 |
MIDDLE
Here is the matrix T_Ro0m for the middle (lengths are in mm):
| 1.0 | 0.0 | 0.0 | 17.8 |
| 0.0 | 0.0 | 1.0 | -8.30233 |
| 0.0 | -1.0 | 0.0 | 11.8 |
| 0 | 0 | 0 | 1 |
Here is the table of the actual DH parameters for middle.
| Link i / H – D | Ai (mm) | di (mm) | alpha i (rad) | theta_i (deg) |
|---|---|---|---|---|
| i = 0 | 28.5 | 0 | 0 | 0 -> 90 |
| i = 1 | 24.0 | 0 | 0 | 0 -> 90 |
| i = 2 | 16.8 | 0 | -pi/2 | 0 -> 90 |
Right
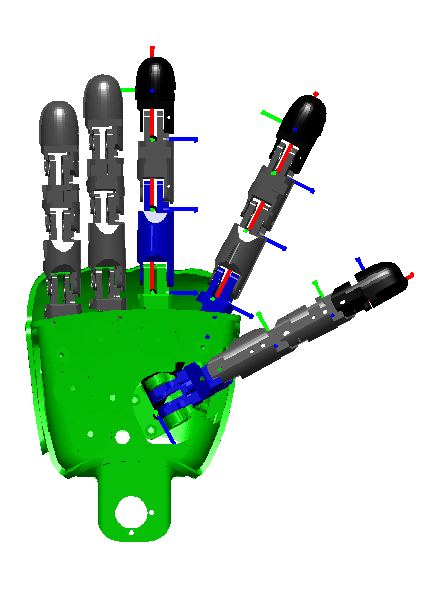
This page provides the forward kinematics of the thumb, the index and the middle fingers of the right hand. It describes how to construct all the finger matrices T_RoRt (thumb), T_RoRi (index) and T_RoRm (middle). Each matrix is constructed in two steps i.e. T_RoRfin = T_Ro0fin * T_0nfin (where fin is t for the thumb, i for the index and m for the middle). The first matrix T_Ro0 describes the rigid roto-translation from the end effector reference frame (described in ICubFowardKinematics) to points in the 0th reference frame as defined by the Denavit-Hartenberg convention. The second matrix T_0n corresponds to the Denavit-Hartenberg description of the forward kinematic, i.e. the roto-translation from the 0th reference frame to the nth reference frame being n the number of degrees of freedom.
The matrix T_0n is itself the composition of n matrices as defined by the DH convention: T_0n = T_01 T_12 ... T_(n-1)n.
The frames are oriented as in the Figure. The '''x''' axis is in '''red'''. The '''y''' axis is in '''green'''. The '''z''' axis is in blue. .
THUMB
Here is the matrix T_Ro0t for the thumb version a (lengths are in mm):
| 0.121132 | 0.043736 | -0.991672 | -25.391770 |
| -0.958978 | 0.263104 | -0.105535 | -11.783901 |
| 0.256297 | 0.963776 | 0.073812 | -1.7018 |
| 0 | 0 | 0 | 1 |
Here is the matrix T_Ro0t for the thumb version b (lengths are in mm):
| 0.478469 | 0.063689 | -0.875792 | -24.029759 |
| -0.878095 | 0.039246 | -0.476873 | -11.93433 |
| 0.004 | 0.997198 | 0.074703 | -1.68926 |
| 0 | 0 | 0 | 1 |
Here is the table of the actual DH parameters for thumb.
| Link i / H – D | Ai (mm) | di (mm) | alpha i (rad) | theta_i (deg) |
|---|---|---|---|---|
| i = 0 | 0 | 0 | -pi/2 | 10 -> 90 |
| i = 1 | 21.0 | 5.6 | 0 | 0 (dummy link) |
| i = 2 | 26.0 | 0 | 0 | 0 -> 90 |
| i = 3 | 22.0 | 0 | 0 | 0 -> 90 |
| i = 4 | 16.8 | 0 | -pi/2 | 0 -> 90 |
INDEX
Here is the matrix T_Ro0i for the index (lengths are in mm):
| 0.898138 | 0.439714 | 0.0 | 2.45549 |
| -0.43804 | 0.89472 | 0.087156 | -25.320433 |
| 0.038324 | -0.078278 | 0.996195 | -10.973325 |
| 0 | 0 | 0 | 1 |
Here is the table of the actual DH parameters for index.
| Link i / H – D | Ai (mm) | di (mm) | alpha i (rad) | theta_i (deg) |
|---|---|---|---|---|
| i = 0 | 14.8 | 0 | pi/2 | 0 -> 20 |
| i = 1 | 25.9 | 0 | 0 | 0 -> 90 |
| i = 2 | 22.0 | 0 | 0 | 0 -> 90 |
| i = 3 | 16.8 | 0 | -pi/2 | 0 -> 90 |
MIDDLE
Here is the matrix T_Ro0m for the middle (lengths are in mm):
| 1.0 | 0.0 | 0.0 | 17.8 |
| 0.0 | 0.0 | -1.0 | -8.30233 |
| 0.0 | 1.0 | 0.0 | -11.8 |
| 0 | 0 | 0 | 1 |
Here is the table of the actual DH parameters for middle.
| Link i / H – D | Ai (mm) | di (mm) | alpha i (rad) | theta_i (deg) |
|---|---|---|---|---|
| i = 0 | 28.5 | 0 | 0 | 0 -> 90 |
| i = 1 | 24.0 | 0 | 0 | 0 -> 90 |
| i = 2 | 16.8 | 0 | -pi/2 | 0 -> 90 |