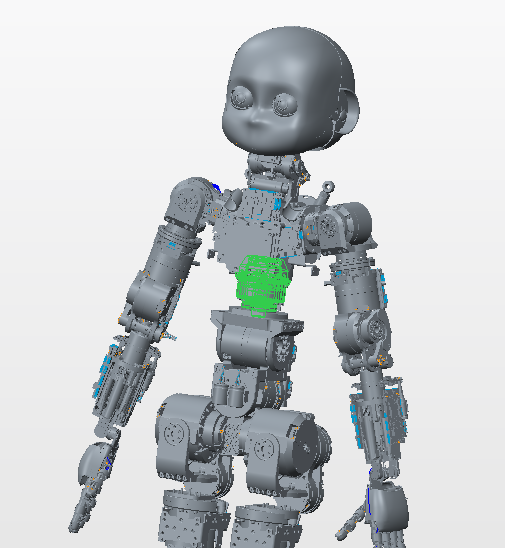
iCub 3
Here's are described the elctrical and mechanical specifications for each joint
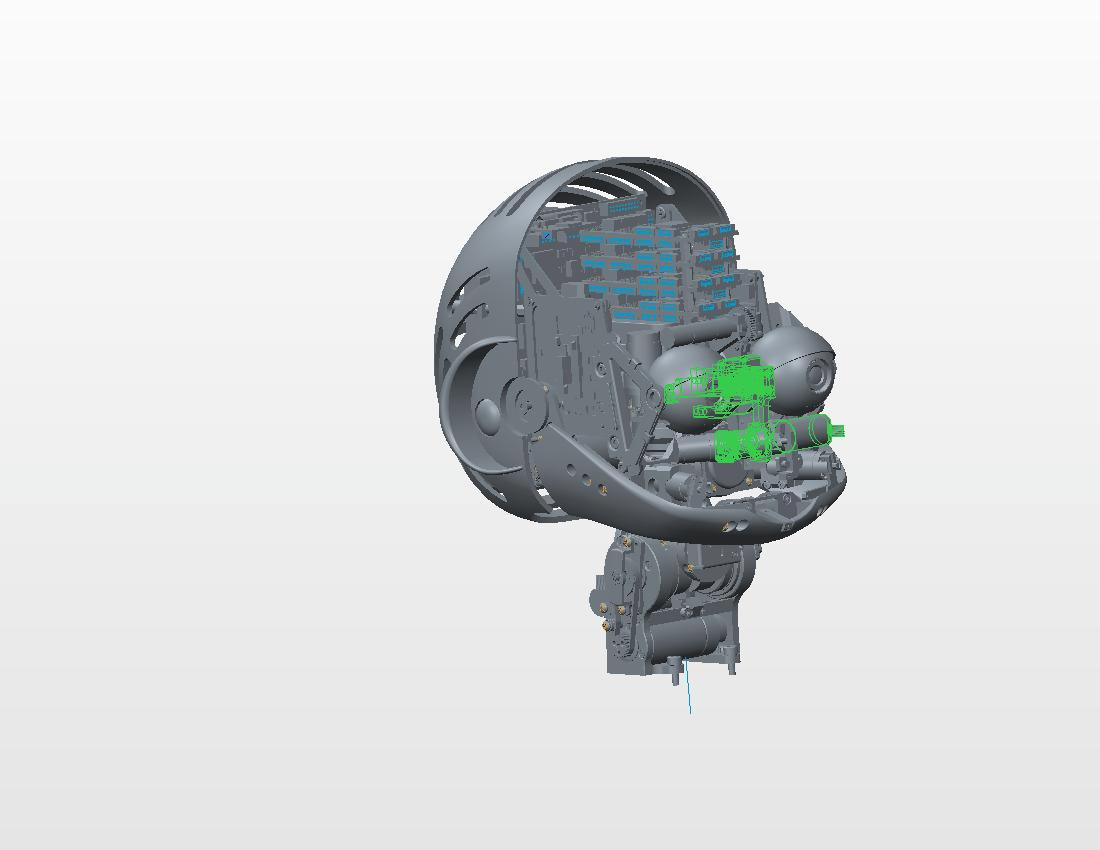
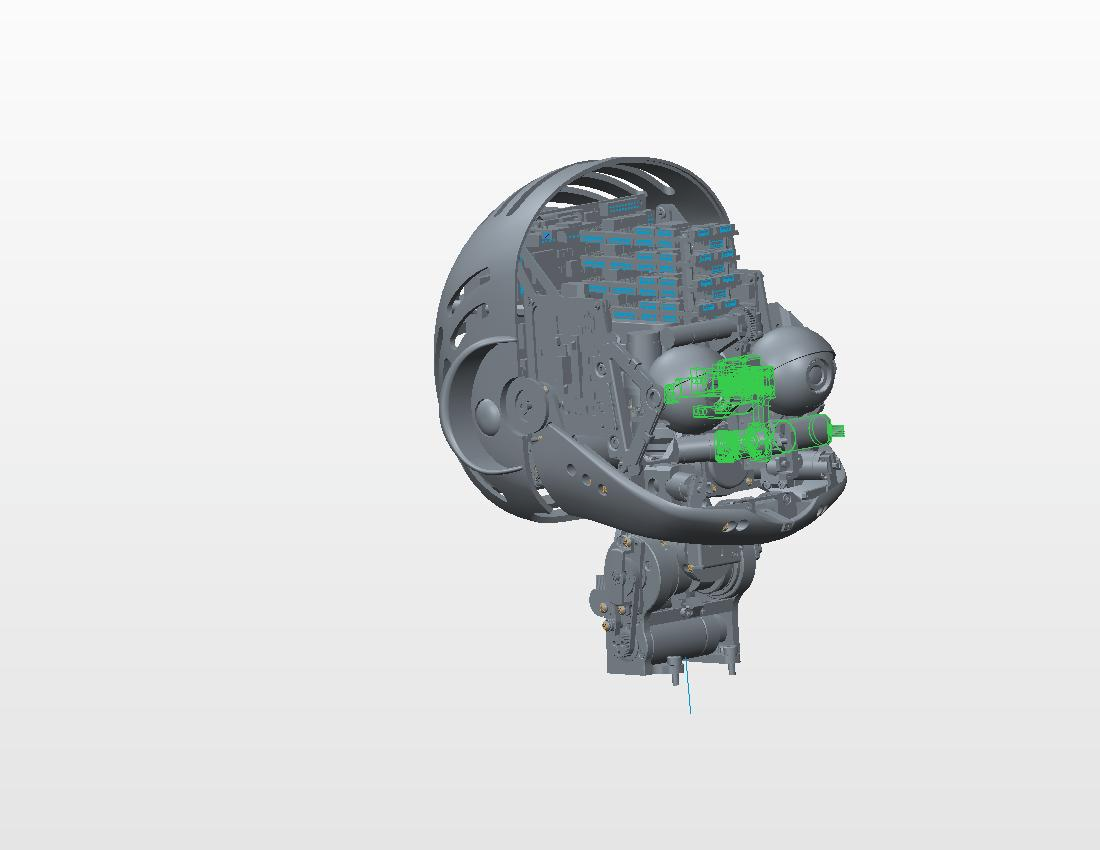
Head Joints Specs

Joints 0,1 - pitch and roll (coupled)
|
|
 |
 |
| Motor type |
DC |
| Motor Encoder |
512 ppr |
| First stage reduction |
18/28 |
| Harmonic drive |
1/100 |
| Last stage (cables and pulleys reduction) |
30.5/31.7 |
| Joint encoder |
AEA |
| HW limits |
pitch -30/+41 roll ±40 (degrees) |
Joint 2 - yaw
|
|
 |
|
| Motor type |
DC |
| Motor Encoder |
512 ppr |
| First stage reduction |
- |
| Harmonic drive |
1/100 |
| Last stage (cables and pulleys reduction) |
- |
| Joint encoder |
AEA |
| HW limits |
±45 (degrees) |
Joint 3 - eyes tilt
|
|
 |
|
| Motor type |
DC |
| Motor Encoder |
512 ppr |
| First stage reduction |
- |
| Harmonic drive |
1/100 |
| Last stage (cables and pulleys reduction) |
- |
| Joint encoder |
AEA |
| HW limits |
±45 (degrees) |
Joint 4,5 - eyes pan
|
|
 |
|
| Motor type |
DC |
| Motor Encoder |
512 ppr |
| First stage reduction |
- |
| Harmonic drive |
1/50 |
| Last stage (cables and pulleys reduction) |
- |
| Joint encoder |
- |
| HW limits |
±30 (degrees) |
Face Joints Specs
Joint 0 - Eyelids
|
|
 |
|
| Motor type |
DC |
| Motor Encoder |
10 lpr |
| Integrated gearbox |
1/16 |
| Joint encoder |
AEA |
| Last stage reduction |
42/100 |
| HW limits |
0/-70 (degrees) |
Upperarm Joints specs
Joint 0 - shoulder pitch
|
|
 |
|
| Motor type |
Brushless C2900576 8 poles |
| Motor Encoder |
Lcore optical encoder on motor shaft |
| Harmonic drive |
1/100 |
| Joint encoder |
Magnetic target 64/63 & AMO board (MU7S_64-63N PWB 103839) |
| HW limits |
-25/+180 (degrees) |
Joint 1 - shoulder roll
|
|
 |
|
| Motor type |
Brushless C2900576 8 poles |
| Motor Encoder |
Lcore optical encoder on motor shaft |
| Harmonic drive |
1/100 |
| Joint encoder |
Magnetic target 64/63 & AMO board (MU7S_64-63N PWB 103839) |
| HW limits |
-15/+150 (degrees) |
Joint 2 - upperarm yaw
|
|
 |
|
| Motor type |
Brushless C2900576 8 poles |
| Motor Encoder |
Lcore optical encoder on motor shaft |
| Harmonic drive |
1/100 |
| Joint encoder |
magnetic target 64/63 & AMO board (MU7S_64-63N PWB 103839) |
| HW limits |
-52/+82 (degrees) |
Joint 3 - elbow
|
|
 |
|
| Motor type |
Brushless C2900576 8 poles |
| Motor Encoder |
Lcore optical encoder on motor shaft |
| Harmonic drive |
1/100 |
| Joint encoder |
magnetic target MU7S_25-32N & AMO board (MU7S_64-63N PWB 103839) |
| HW limits |
-5/+115 (degrees) |
Forearm Joints specs
Joint 4 - Pronosupination
|
|
 |
|
| Motor type |
DC |
| Motor Encoder |
512 ppr |
| Harmonic drive |
1/100 |
| Joint encoder |
- |
| HW limits |
-90/+90 (degrees) |
Joint 5,6 -Wrist yaw and pitch - coupled
|
|
 |
|
| Motor type |
DC |
| Motor Encoder |
400 ppr |
| Integrated gearbox |
1/159 |
| Cables’pulleys reduction |
14/18.8 |
| Joint encoder |
AEA (both joints) |
| HW limits |
-45/+45 (degrees) |
Joint 7 - Fingers abduction
|
|
 |
|
| Motor type |
DC |
| Motor Encoder |
10 ppr |
| Integrated gearbox |
1/256 |
| Cables’pulleys reduction |
- |
| Joint encoder |
Hall effect sensor |
Joint 8 - Thumb abduction
|
|
 |
|
| Motor type |
DC |
| Motor Encoder |
no |
| Integrated gearbox |
1/256 |
| Cables’pulleys reduction |
- |
| Joint encoder |
Hall effect sensor |
Joint 9,11,13 - Thumb, index and middle proximals
|
|
 |
|
| Motor type |
DC |
| Motor Encoder |
10 ppr |
| Integrated gearbox |
1/256 |
| Cables’pulleys reduction |
- |
| Joint encoder |
Hall effect sensor |
Joint 10 - Thumb distals - 2 joints 1 motor
|
|
 |
|
| Motor type |
DC |
| Motor Encoder |
10 ppr |
| Integrated gearbox |
1/256 |
| Cables’pulleys reduction |
- |
| Joint encoder |
Hall effect sensor |
Joint 12 - Index distals - 2 joints 1 motor
|
|
 |
|
| Motor type |
DC |
| Motor Encoder |
10 ppr |
| Integrated gearbox |
1/256 |
| Cables’pulleys reduction |
- |
| Joint encoder |
Hall effect sensor |
Joint 14 - Middle distals - 2 joints 1 motor
|
|
 |
|
| Motor type |
DC |
| Motor Encoder |
10 ppr |
| Integrated gearbox |
1/256 |
| Cables’pulleys reduction |
- |
| Joint encoder |
Hall effect sensor |
Joint 15 - Ring and pinky distals - 4 joints 1 motor
|
|
 |
|
| Motor type |
DC |
| Motor Encoder |
10 ppr |
| Integrated gearbox |
1/256 |
| Cables’pulleys reduction |
- |
| Joint encoder |
Hall effect sensor |
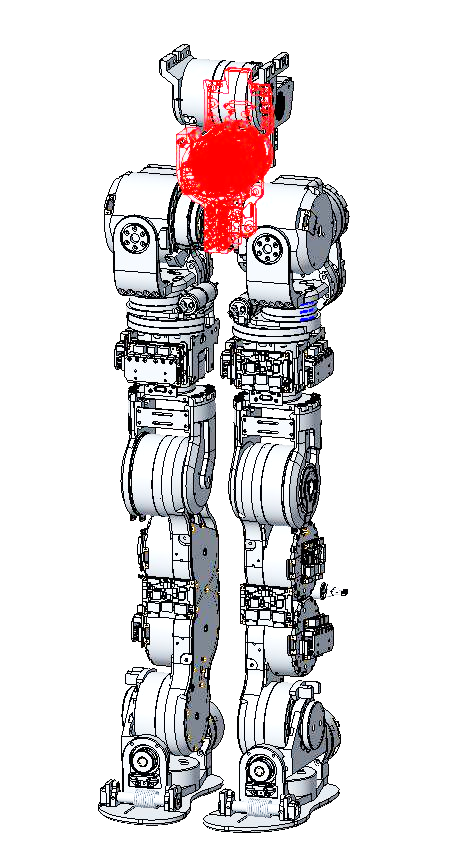
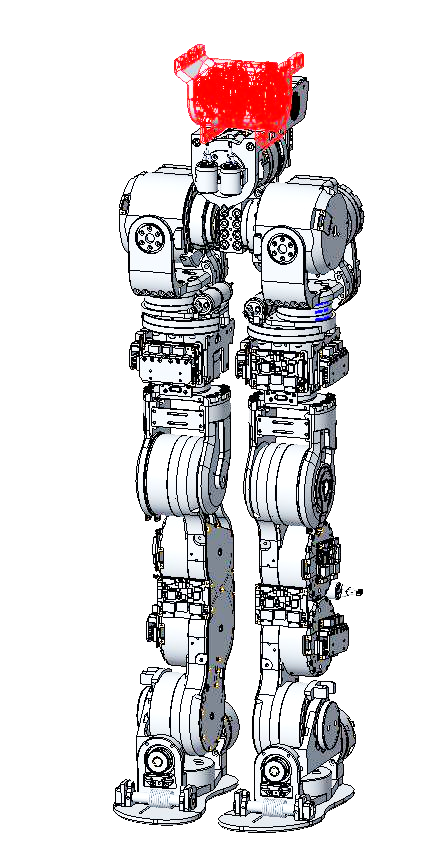
Lowebody Joints specs
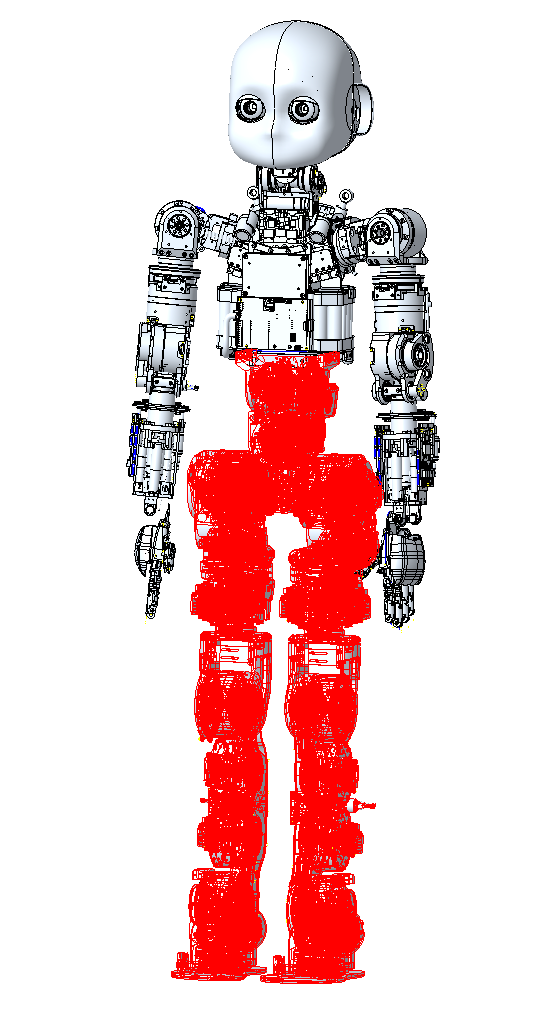
Torso joints
Joint 0 - torso roll
|
|
 |
|
| Motor type |
MOOG_C2900576 Moog BLDC motor, OD 49.2, ID 15.5, L 24.7 , W/O HALL SENSOR |
| Fast shaft sensor |
Lcore 5 – optical disk 004 |
| Slow shaft sensor drive |
AMO board - magnetic target 64/63 (MU7S_64-63N PWB 103839) |
| Harmonic drive |
CSD-20-100-2UH_CS (1:100) |
| HW limits |
+25/-25 (degrees) |
| SW limits |
- |
Joint 1 - torso pitch
|
|
 |
|
| Motor type |
MOOG_C2900576 Moog BLDC motor, OD 49.2, ID 15.5, L 24.7 , W/O HALL SENSOR |
| Fast shaft sensor |
Lcore 5 – optical disk 004 |
| Slow shaft sensor drive |
AMO board - magnetic target 64/63 (MU7S_64-63N PWB 103839) |
| Harmonic drive |
CSD-20-100-2UH_CS (1:100) |
| HW limits |
+65/-25 front/rear (degrees) |
| SW limits |
- |
Joint 2 - torso yaw
|
|
 |
|
| Motor type |
Brushless C2900576 8 poles |
| Motor Encoder |
Lcore optical encoder on motor shaft |
| Harmonic drive |
1/100 |
| Joint encoder |
Magnetic target 64/63 & AMO board (MU7S_64-63N PWB 103839) |
| HW limits |
-45/+45 (degrees) |
Legs joints
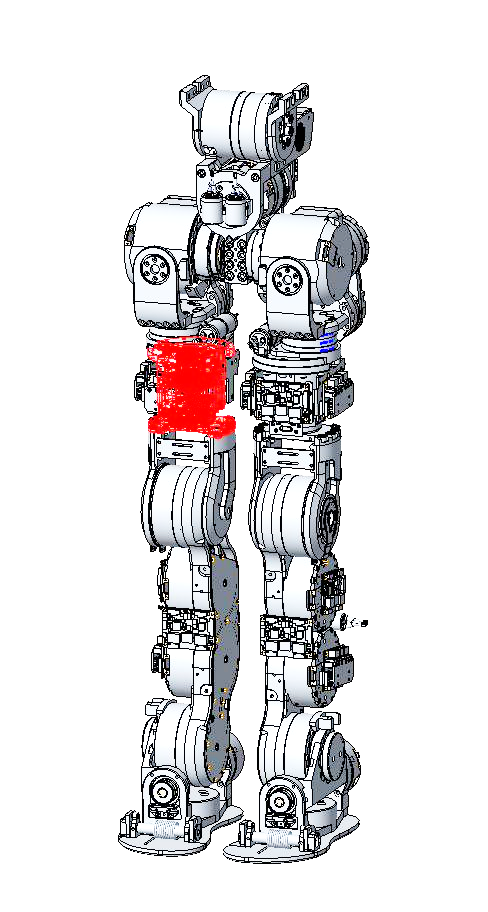
Joint 0 - left, right hip pitch
|
|
 |
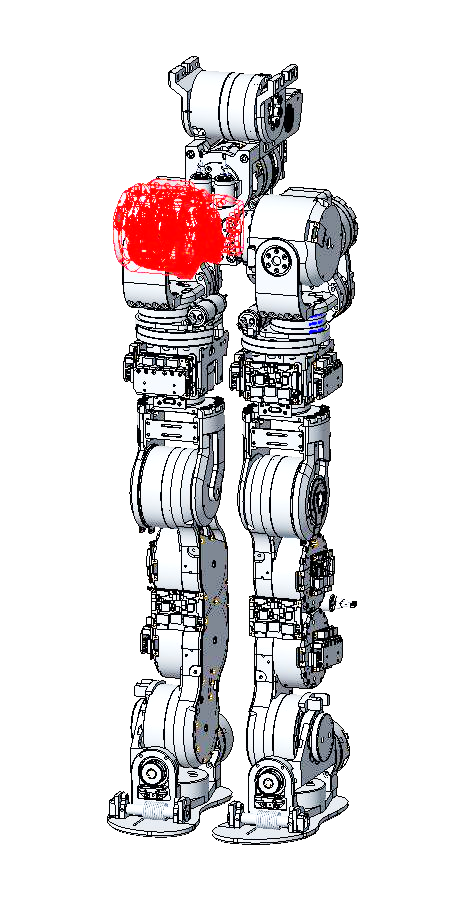 |
| Motor type |
MOOG_C2900580 Moog BLDC motor, OD 72.4, ID 15.5, L 27.5 , W/O HALL SENSOR |
| Fast shaft sensor |
Lcore 5 – optical disk 004 |
| Slow shaft sensor drive |
AMO board - magnetic target 64/63 (MU7S_64-63N PWB 103839) |
| Harmonic drive |
CSD-20-100-2UH_CS (1:100) |
| HW limits |
+94/-47 front/rear (degrees) |
| SW limits |
- |
Joint 1 - left, right hip roll
|
|
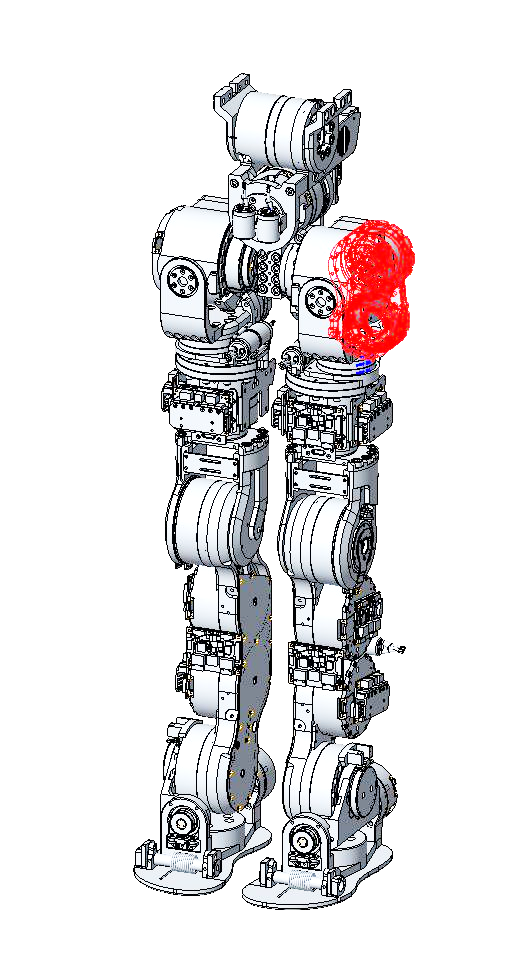 |
 |
| Motor type |
MOOG_C2900576 Moog BLDC motor, OD 49.2, ID 15.5, L 24.7 , W/O HALL SENSOR |
| Fast shaft sensor |
Lcore 5 – optical disk 004 |
| Slow shaft sensor drive |
AMO board - magnetic target 64/63 (MU7S_64-63N PWB 103839) |
| Harmonic drive |
CSD-20-100-2UH_CS (1:100) |
| HW limits |
+120/-20 front/rear (degrees) |
| SW limits |
- |
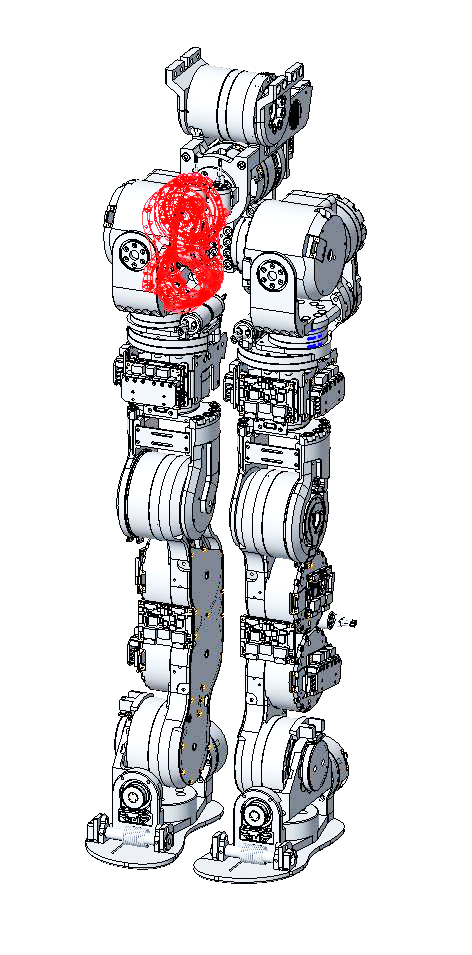
Joint 2 - left, right yaw
|
|
 |
 |
| Motor type |
MOOG_C2900576 Moog BLDC motor, OD 49.2, ID 15.5, L 24.7 , W/O HALL SENSOR |
| Fast shaft sensor |
Lcore 5 – optical disk 004 |
| Slow shaft sensor drive |
AMO board - magnetic target 64/63 (MU7S_64-63N PWB 103839) |
| Harmonic drive |
CSD-20-100-2UH_CS (1:100) |
| HW limits |
-80.5/+80.5 (degrees) |
| SW limits |
- |
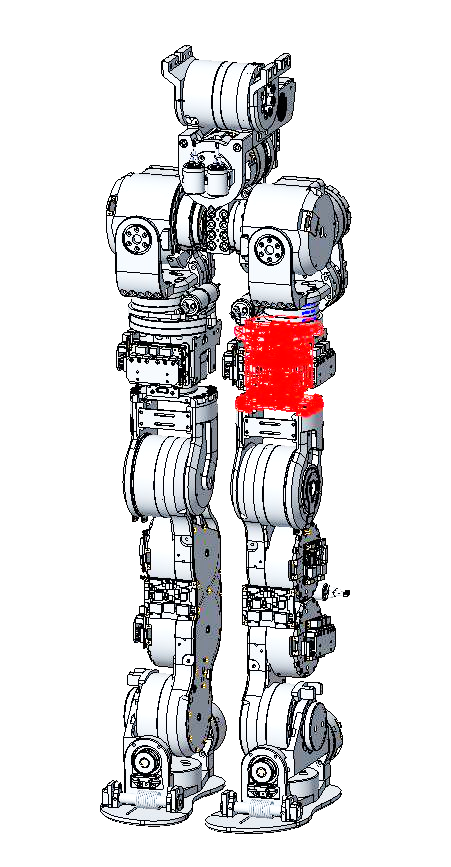
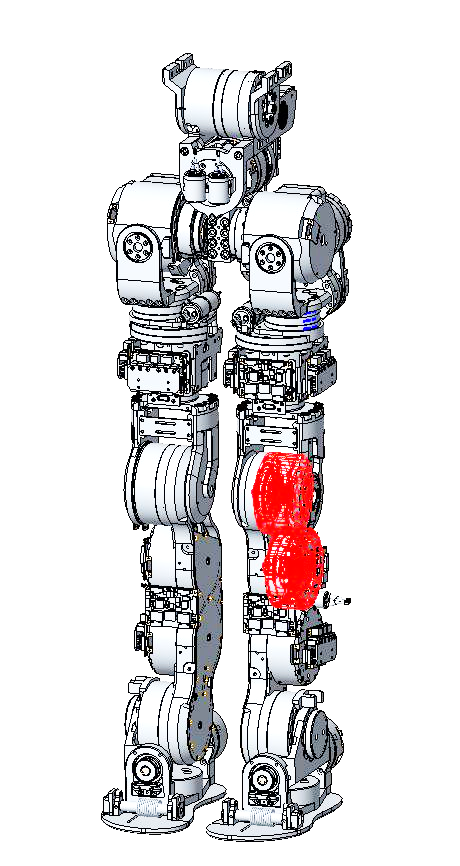
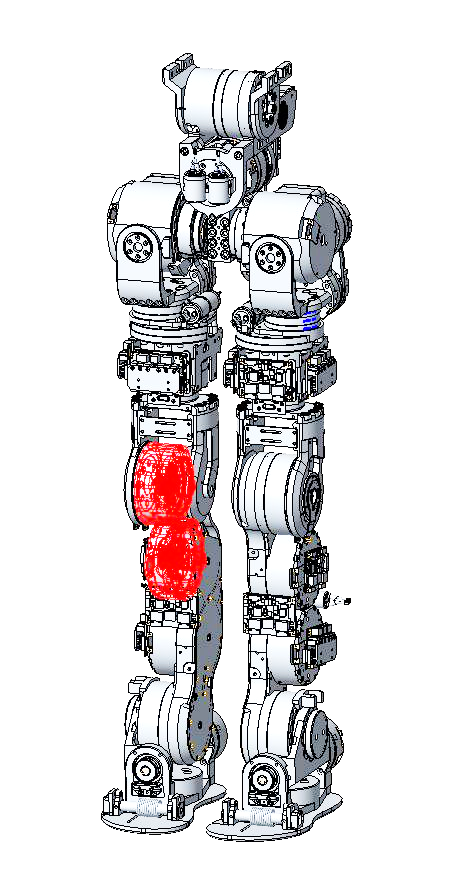
Joint 3 - left, right knee
|
|
 |
 |
| Motor type |
MOOG_C2900580 Moog BLDC motor, OD 72.4, ID 15.5, L 27.5 , W/O HALL SENSOR |
| Fast shaft sensor |
Lcore 5 – optical disk 004 |
| Slow shaft sensor drive |
AMO board - magnetic target 64/63 (MU7S_64-63N PWB 103839) |
| Harmonic drive |
CSD-25-100-2UH_CS (1:100) |
| HW limits |
+105/-5 (degrees) |
| SW limits |
- |
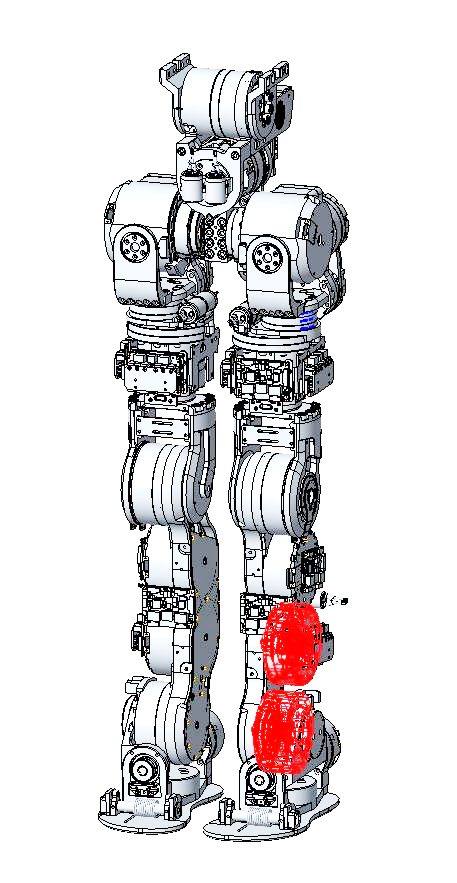
|
|
 |
 |
| Motor type |
MOOG_C2900580 Moog BLDC motor, OD 72.4, ID 15.5, L 27.5 , W/O HALL SENSOR |
| Fast shaft sensor |
Lcore 5 – optical disk 004 |
| Slow shaft sensor drive |
AMO board - magnetic target 64/63 (MU7S_64-63N PWB 103839) |
| Harmonic drive |
CSD-25-100-2UH_CS (1:100) |
| HW limits |
+45/-45 (degrees) |
| SW limits |
- |
|
|
 |
 |
| Motor type |
MOOG_C2900576 Moog BLDC motor, OD 49.2, ID 15.5, L 24.7 , W/O HALL SENSOR |
| Fast shaft sensor |
Lcore 5 – optical disk 004 |
| Slow shaft sensor drive |
AMO board - magnetic Encoder (MU7S_25-32N) |
| Harmonic drive |
CSD-17-100-2A (1:100) |
| HW limits |
+25/-25 (degrees) |
| SW limits |
- |