Robot Testing - Encoders and Joints limit (manual)
This page shows how to manually run tests on the robot using the icub-tests package and Robot Testing Framework.
Preliminary actions
In order to use the tests available for icub, it is necessary to compile the robotology-superbuild with the ROBOT_TESTING_FRAMEWORK flag enabled. This will create a folder in the source code where you will find the suites to run for testing encoders and joint limits.
Test Encoders
Optical Encoders Drift
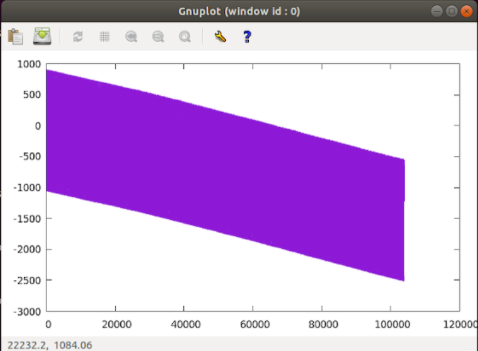
This test moves each joint for 1000 cycles and prints out the motor encoder sinusoid. It is important to check if the encoder eventually drifts -meaning that the optical disk is dirty and it needs to be cleaned. The drifting can be seen as a slope in the plot:
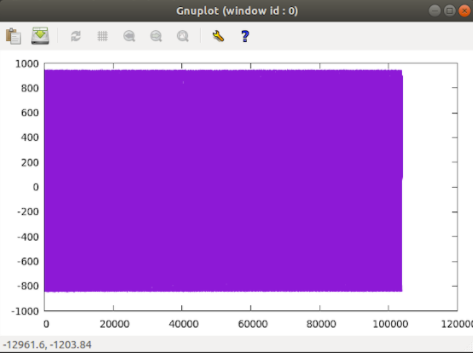
A correct example of non-drift is:
Motor Encoder Consistency
This test performs a comparison between the joint encoder and the motor encoder parameters. The resulting plots should be overlapped.
Go to the icub-tests directory:
cd robotology-superbuild/src/icub-tests/suites
Open the file encoders-icub.xml and test one part at the time by commenting the others. For each part test first the optical_encoders_drift and then MotorEncoderConsistency.
Now, from the previous folder, go into
cd contexts/icub
and check the files .ini related to the part that you are testing - this files contain the info about motion range, tolerance and number of cycles.
Now run the command
robottestingframework-testrunner -v -s encoders-icub.xml
💾 It will automatically save the results in a text file on the same folder where I launched the test. The terminal gives then instructions about how to plot the data with gnuplot (run sudo apt install gnuplot if needed). Launch 1 joint at the time ([col=1:1], then [col=2:2] ecc..). For the encoder drift test, the correct plot should show a unique band without any drift. It means that all the encoder readings are correct. For the Motor Consistency test, the resulting plots should be overlapped.
⚠️ There may be some problems with the relative paths of the .ini files, to solve this you can edit the encoders-icub.xml file as follows:
<test type="dll" param="--from contexts/icub/optical_encoders_drift_left_arm.ini"> OpticalEncodersDrift </test>
<test type="dll" param="--from contexts/icub/optical_encoders_drift_right_arm.ini"> OpticalEncodersDrift </test>
<test type="dll" param="--from contexts/icub/optical_encoders_drift_left_leg.ini"> OpticalEncodersDrift </test>
<test type="dll" param="--from contexts/icub/optical_encoders_drift_right_leg.ini"> OpticalEncodersDrift </test>
<test type="dll" param="--from contexts/icub/optical_encoders_drift_torso.ini"> OpticalEncodersDrift </test>
<test type="dll" param="--from contexts/icub/motorEncoderConsistency_left_arm.ini"> MotorEncodersConsistency </test>
<test type="dll" param="--from contexts/icub/motorEncoderConsistency_right_arm.ini"> MotorEncodersConsistency </test>
<test type="dll" param="--from contexts/icub/motorEncoderConsistency_left_leg.ini"> MotorEncodersConsistency </test>
<test type="dll" param="--from contexts/icub/motorEncoderConsistency_right_leg.ini"> MotorEncodersConsistency </test>
<test type="dll" param="--from contexts/icub/motorEncoderConsistency_torso.ini"> MotorEncodersConsistency </test>
<test type="dll" param="--from contexts/icub/motorEncodersConsistency_face.ini"> MotorEncodersConsistency </test>
<test type="dll" param="--from contexts/icub/motorEncodersConsistency_head.ini"> MotorEncodersConsistency </test>
⚠️ If the test fails starting, repeat it tuning the tolerance value tol but stay below 1.5 deg (⚠️ error! We should perform a PID test BEFORE!!! and tol should be a smaller number). If the test fails, meaning that the plots are not good, the encoder might need to be cleaned/substituted.
Joints limit test
Go to the icub-tests directory:
cd robotology-superbuild/src/icub-tests/suites
Edit with gedit the file jointsLimits_robotEth.xml and test one part at the time by commenting the others.
Now go into
cd contexts/icubEth
and check the files .ini related to the part that you are testing - this files contain the info about speed, tolerance and out of bound positions.
Now run the command
robottestingframework-testrunner -v -s jointsLimits_robotEth.xml -o part_name.txt
💾 It will save the results in a text file on the Desktop. If you run the command without this part > /home/icub/Desktop/part_name.txt the results will be automatically saved in the current folder as result.txt BUT it will be overwritten every time.
⚠️ There may be some problems with the relative paths of the .ini files, to solve this you can edit the jointsLimits_robotEth.xml file as follows:
<test type="dll" param="--from contexts/icubEth/joint_limits_right_arm.ini"> JointLimits </test>
<test type="dll" param="--from contexts/icubEth/joint_limits_left_arm.ini"> JointLimits </test>
<test type="dll" param="--from contexts/icubEth/joint_limits_right_leg.ini"> JointLimits </test>
<test type="dll" param="--from contexts/icubEth/joint_limits_left_leg.ini"> JointLimits </test>
<test type="dll" param="--from contexts/icubEth/joint_limits_torso.ini"> JointLimits </test>
<test type="dll" param="--from contexts/icubEth/joint_limits_head.ini"> JointLimits </test>
⚠️ If the tests fails, repeat it tuning the tolerance value tol but stay below 2.5%.